Research Breakthrough Possible @S-Logix
Research Breakthrough Possible @S-Logix
Office Address
- 2nd Floor, #7a, High School Road, Secretariat Colony Ambattur, Chennai-600053 (Landmark: SRM School) Tamil Nadu, India
- pro@slogix.in
- +91-81240 01111
To find the time required for the servo system to respond to a step change in a position set point using deep neural network in R
library(keras)
Load the necessary libraries
Load the data set
Convert the categorical variables to equivalent numeric classes
Split the data set as train set and test set
Initialize the keras sequential model
Build the model with input layers,hidden layers and output layer as per the data size along with the activation function(here 4 I/P layer with relu activation and 1 O/P layer with no activation(for linear))
Compile the model with required loss,metrics and optimizer(here loss=mean square error,optimizer=adam,metrics=mae,mape)
Fit the model using the train set
Predict using the test set
Evaluate the metrics
library(caret)
library(keras)
data=read.csv(‘/…/servo.csv’)
#convert Categorical data to numeric classes
data$Motor=factor(data$Motor,labels=c(0:4))
data$Screw=factor(data$Screw,labels=c(0:4))
#To Split 80% of data as training data
smp_size train_ind #Train set
train_data<-data[train_ind,]
xtrain=train_data[,1:4]
ytrain=train_data$Class
#Test set
test=data[-train_ind,]
xtest=test[,1:4]
ytest=test$Class
#defining a keras sequential model
model %
layer_dense(units = 100, input_shape = 4) %>%
layer_dropout(rate=0.4)%>%
layer_activation(activation = ‘relu’) %>%
layer_dense(units = 1)
#compiling the defined model with metric = accuracy and optimiser as adam.
model %>% compile(
loss = ‘mean_squared_error’,
optimizer = ‘adam’,
metrics = c(‘mae’,’mape’)
)
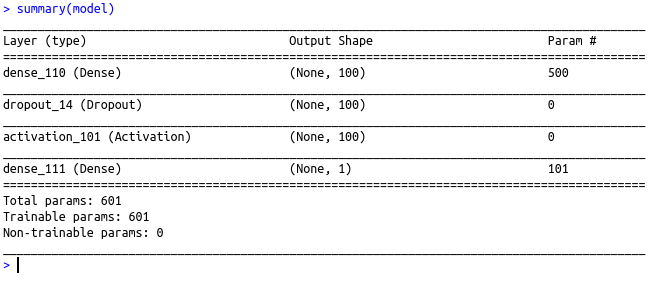
#Summary of the model
summary(model)
#fitting the model on the training dataset
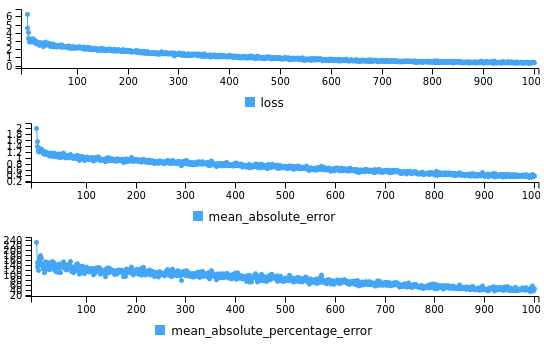
model %>% fit(as.matrix(xtrain), ytrain, epochs = 1000)
#Predict using the Test data
yt=predict(model,as.matrix(xtest))
#Evaluating model on the cross validation dataset
loss_and_metrics % evaluate(as.matrix(xtest), ytest)
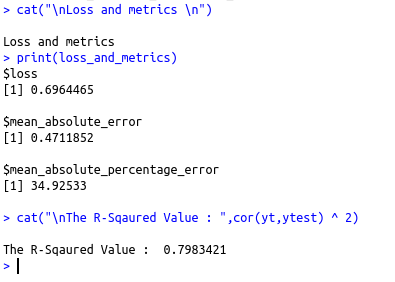
cat(“\nLoss and metrics \n”)
print(loss_and_metrics)
cat(“\nThe R-Sqaured Value : “,cor(yt,ytest) ^ 2)